Programmable Inflatable Origami
Published: International Conference on Soft Robotics (RoboSoft 2023)
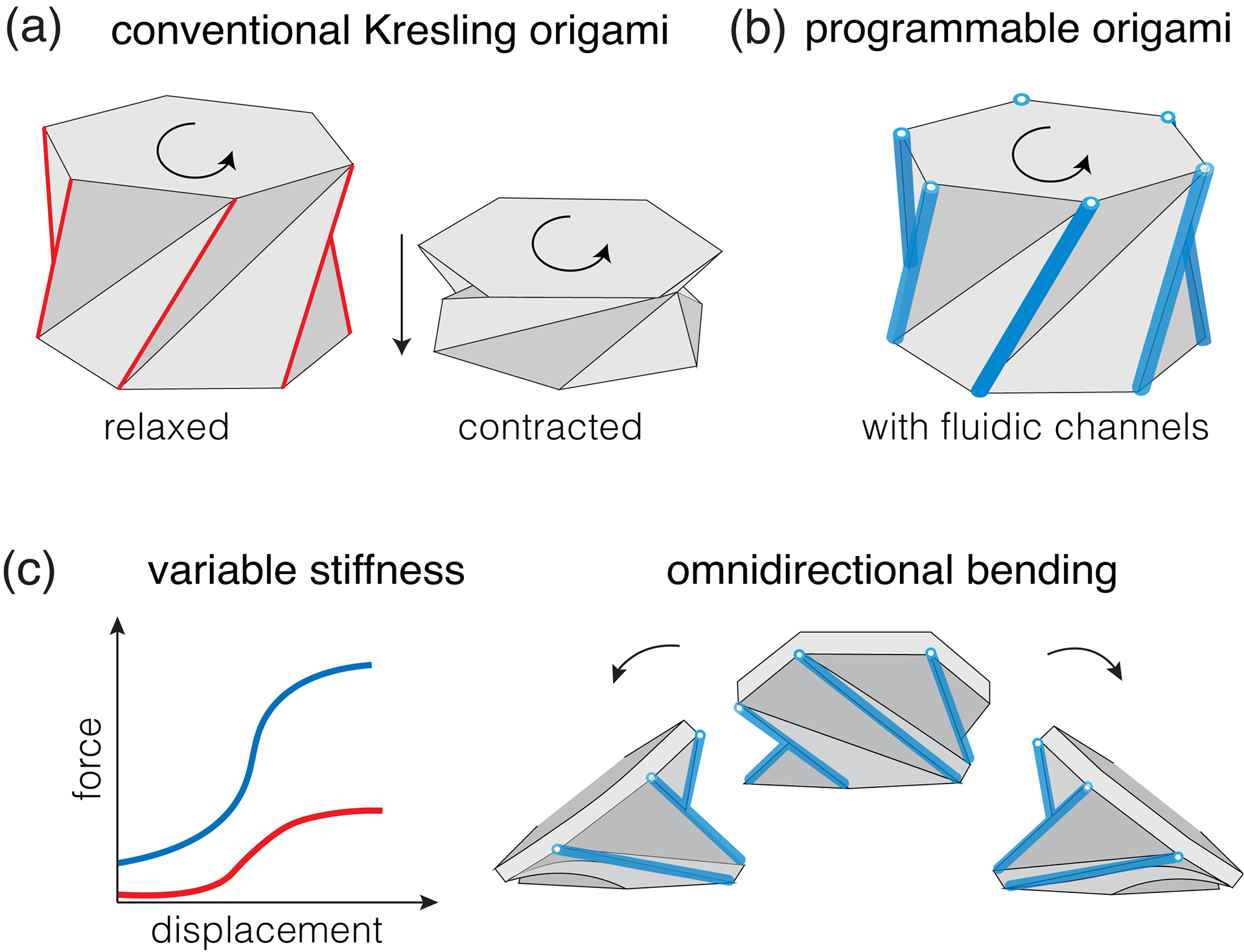
Topic: Here, we propose an entirely soft inflatable origami actuator with variable stiffness and multimodal deformation. The programmable inflatable origami consists of a prismatic chamber based on the Kresling pattern with miniature fluidic channels at the mountain folds. Applying a vacuum to the central chamber provides the main actuation force, while the selective inflation of the fluidic channels controls the motion and changes the stiffness.
Effects of lateral undulation in granular medium burrowing with a peristaltic soft robot
Published: International Conference on Soft Robotics (RoboSoft 2023)
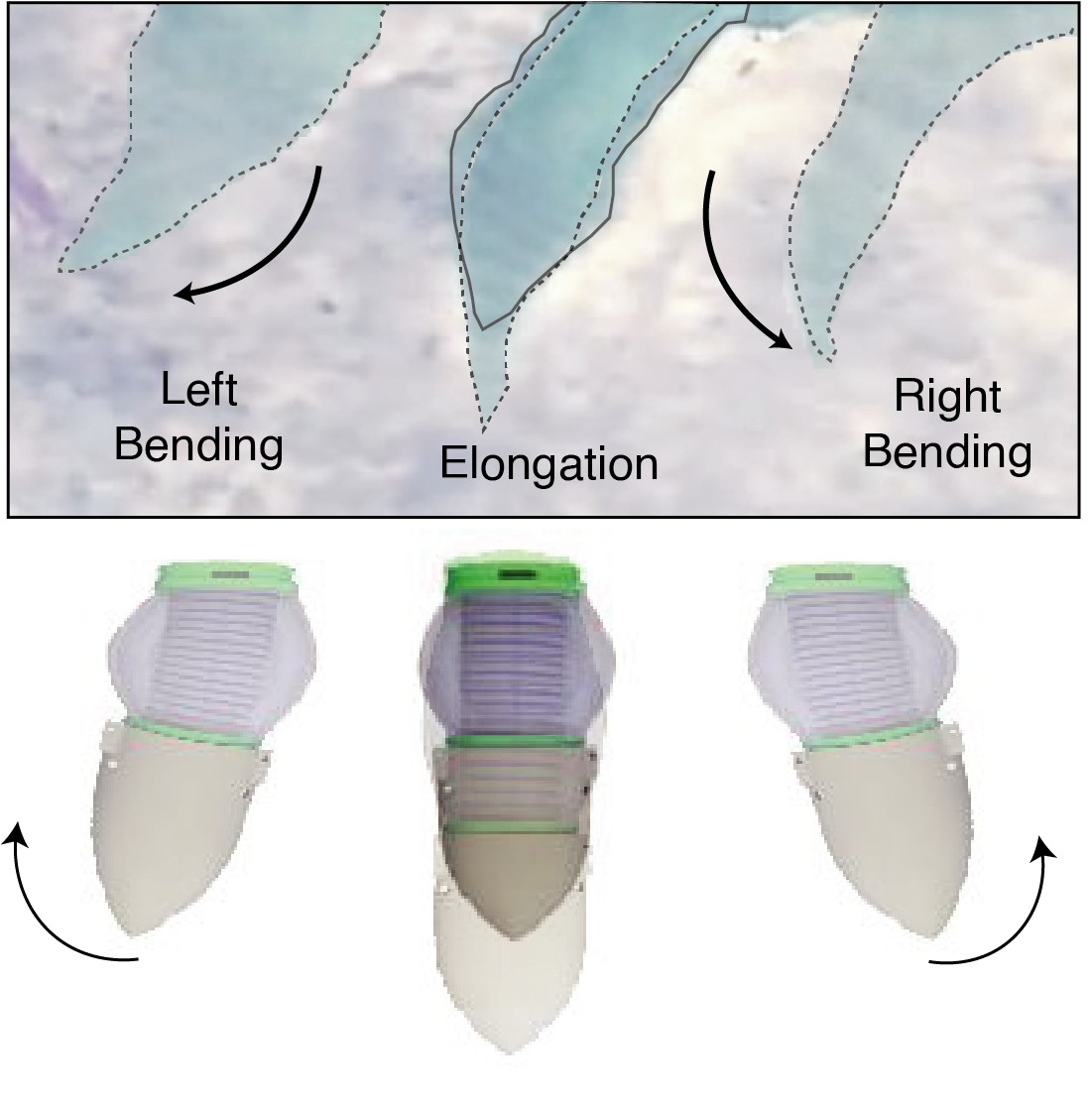
Topic: In this study, we designed and developed a burrowing soft robot for peristaltic locomotion by observing the lateral undulation behavior at the earthworm's anterior region. To achieve this, we utilized two different soft actuator modules. The tip modules performed lateral undulation and elongation, while the rest of the actuator modules facilitated axial elongation and passive contraction. We characterized the actuator's performance in terms of lateral bending angle, elongation displacement, and penetration force when the tip module interacted with granular media for three different cases: static, tip undulation, and tip elongation. Based on the findings of this characterization, we conducted locomotion experiments with three different gait patterns: tip undulation, tip undulation with elongation, and tip elongation, to evaluate the penetration force and behavior of the peristaltic soft robot when moving in granular media. The results show that tip undulation enhances the locomotory performance of the peristaltic soft robot.
Reconfigurable kirigami skins steer a soft robot
Published: International Conference on Soft Robotics (RoboSoft 2023)
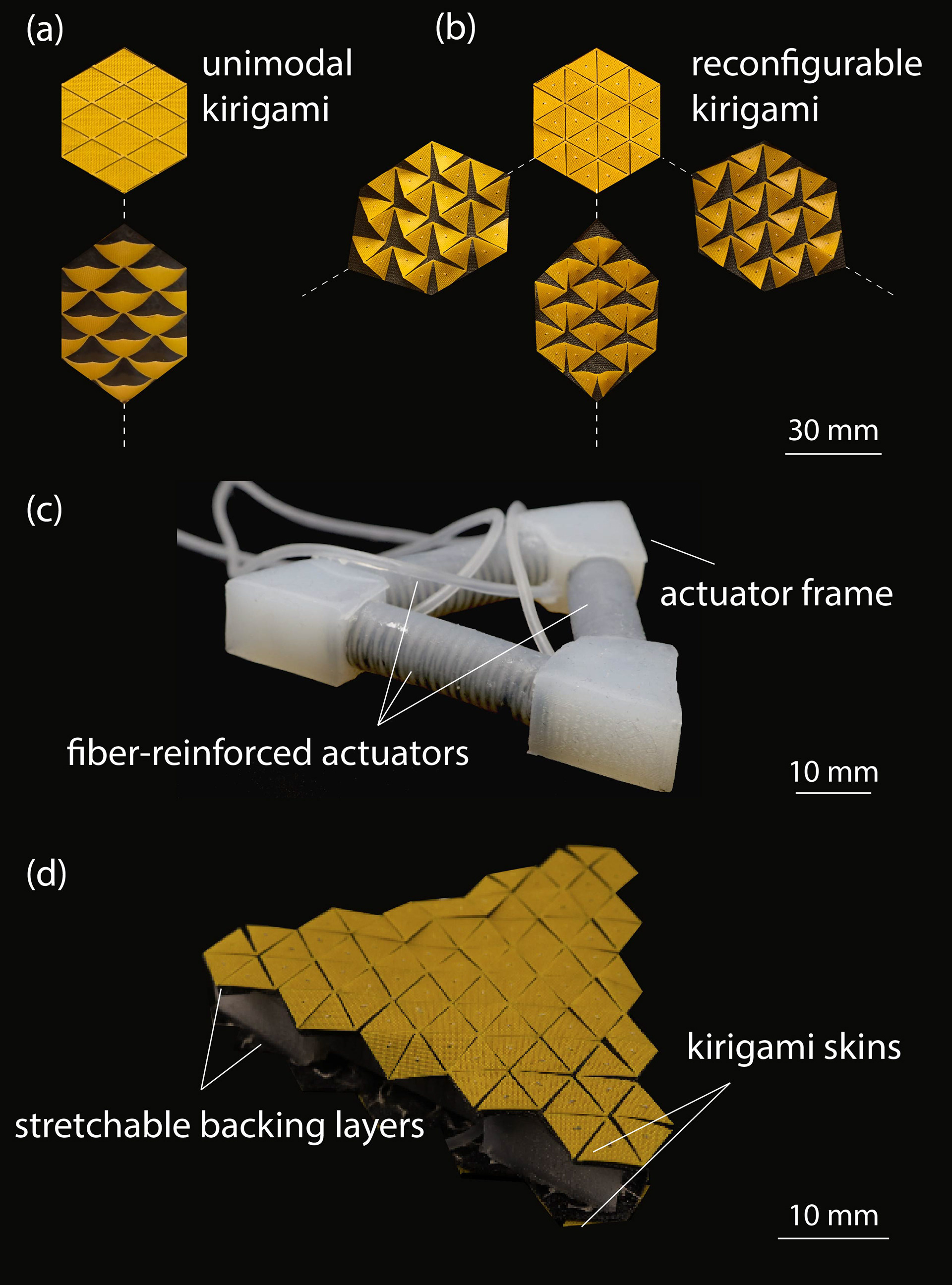
Topic: Here, we create a composite kirigami skin for a soft robot that, in addition to enabling the robot to crawl in a straight line, can reconfigure when stretched along different directions and steer the robot. We fabricated a triangular actuator frame made of three fiber-reinforced extending actuators placed at each edge that, when actuated in pairs, can elongate the frame in three symmetric directions. We covered the actuator with the proposed reconfigurable kirigami skin to create an omnidirectional planar soft crawling robot. We characterized the linear locomotion and maneuvering capabilities of the robot and tracked the robot's trajectories for different combinations of actuation inputs. Our proposed approach uses a single robotics skin to embody multiple locomotion possibilities in soft robots.
Soft robotics towards sustainable development goals and climate actions
Published: Frontiers in Robotics and AI (2023)
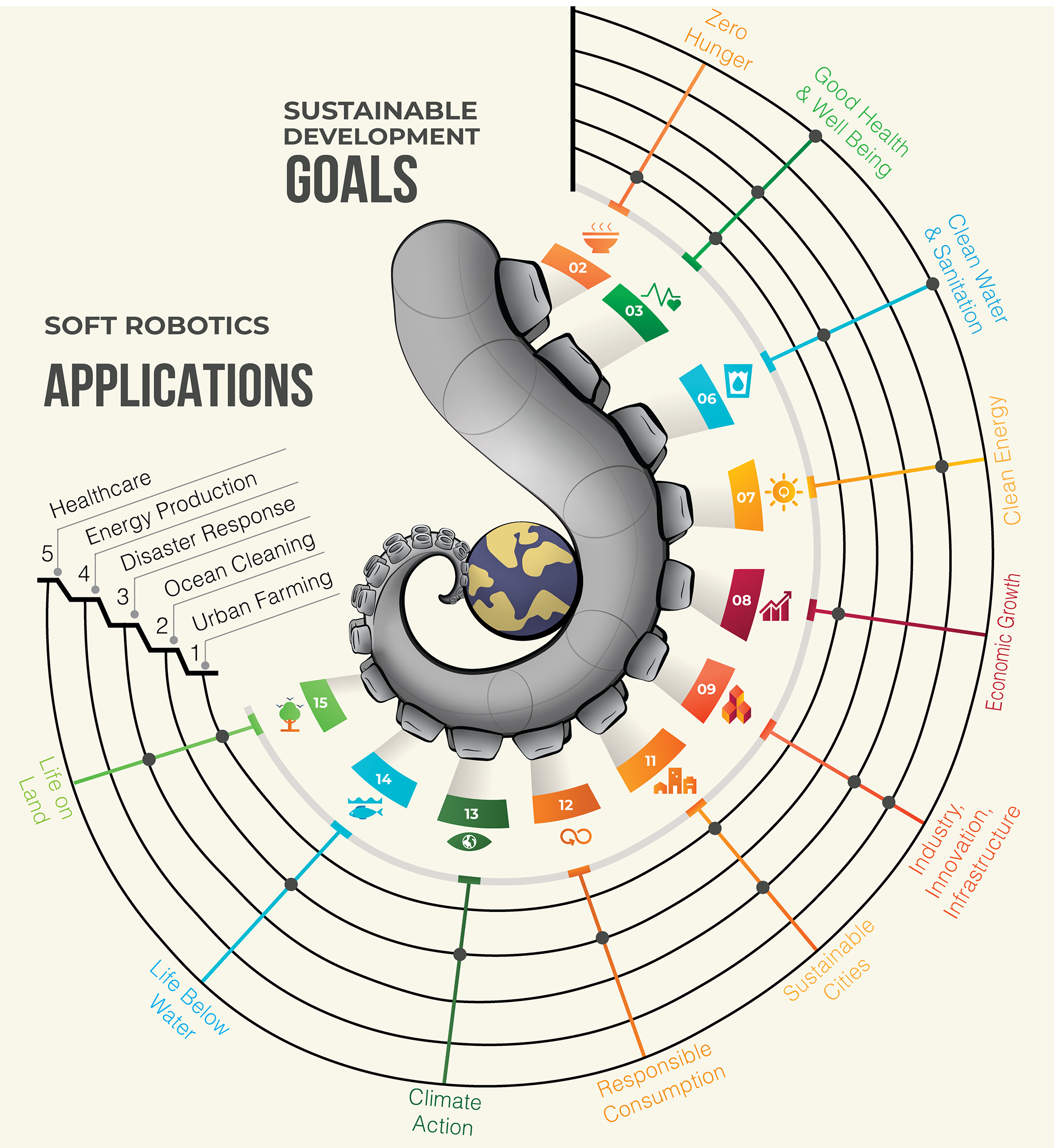
Topic: Sustainable manufacturing of soft robots at a large scale, exploring the potential of biodegradable and bioinspired materials, and integrating onboard renewable energy sources to promote autonomy and intelligence are some of the urgent challenges of this field that we discuss in this paper. Specifically, we will present field-ready soft robots that address targeted productive applications in urban farming, healthcare, land and ocean preservation, disaster remediation, and clean and affordable energy, thus supporting some of the SDGs.
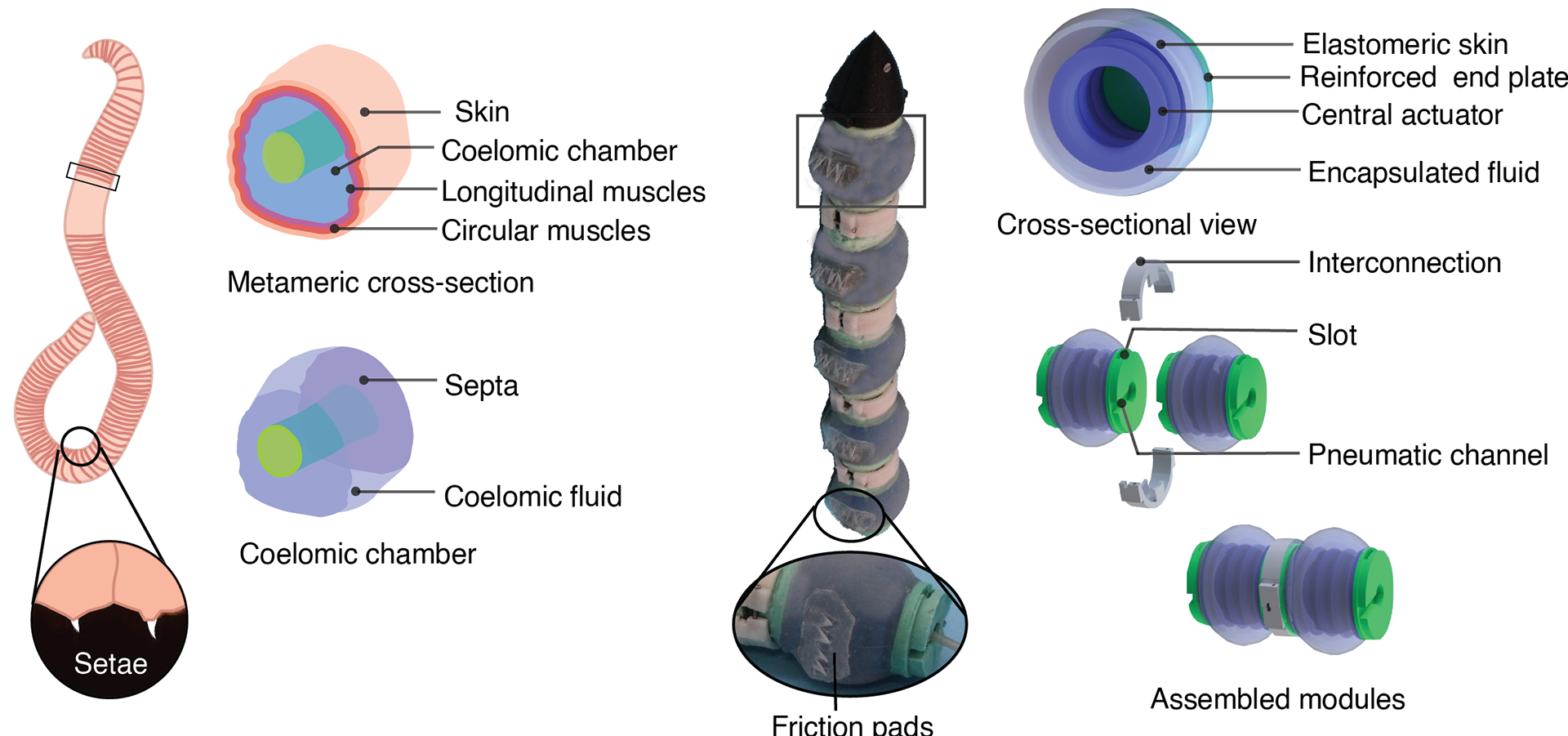
An Earthworm-like Modular Soft Robot for Locomotion in Multi-Terrain Environments
Published: Nature Scientific Reports (2023)
Topic: We present our earthworm-inspired modular soft robot that overcomes challenges in subterranean environments. Our peristaltic soft actuator (PSA) demonstrates versatile locomotion with two active configurations & different forces/displacements based on fluid confined in elastomer chamber.
Paper link: Earthworm-like Modular Soft Robot
What interest us?
•Adaptable locomotion
•Modes of locomotion strategies or pattern,
- Transitions, reaction to stress, change in roughness of the surface or environment.
What we want as a final robot/technological application?
•Introducing new soft actuation solution with proprioception and exteroception feedback for Intelligent control.
(Foot module - SFM, IEEE RA-L, 2020; and Body module -SFA, AISY, 2021)
• Modular robotic platform for collective behavior as swarm intelligence during disaster management, and ecological monitoring.
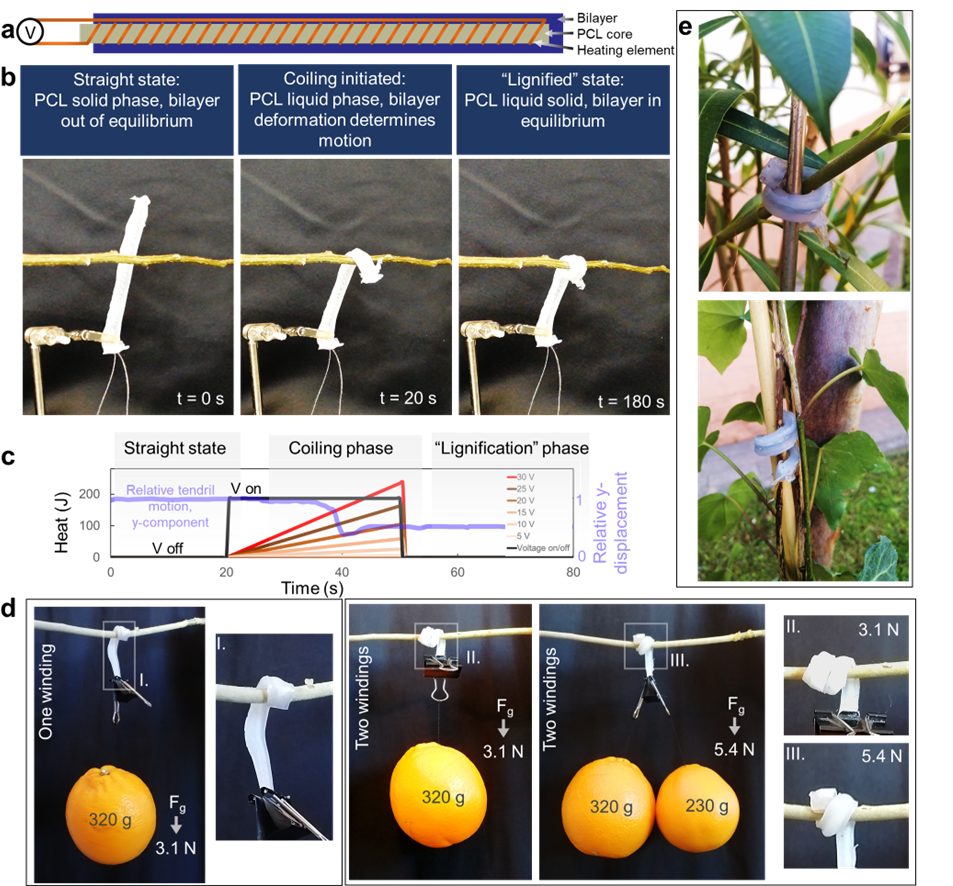
A plant tendril-like soft robot that grasps and anchors by exploiting its pre-programmed functionality
Published: IEEE Robotics and Automation letters (2022)
Topic: We implement a simple hierarchical pre-programmed functionality at the material level using off-the-shelf materials and easy fabrication methods to achieve coiling and stiffening and incorporate an electrical control.
Paper link: Tendril Inspired Soft Robot that Grasps
Sensorized Foam Actuator with Intrinsic Proprioception and Tunable Stiffness Behavior for Soft Robots.
Published: Advanced Intelligent Systems (2021)
Topic: Sensorized Foam Actuator which can sense active actuation and passive deformation at the same time demonstration variable stiffness characteristics.
Paper link: Sensorized Foam Actuator (SFA)
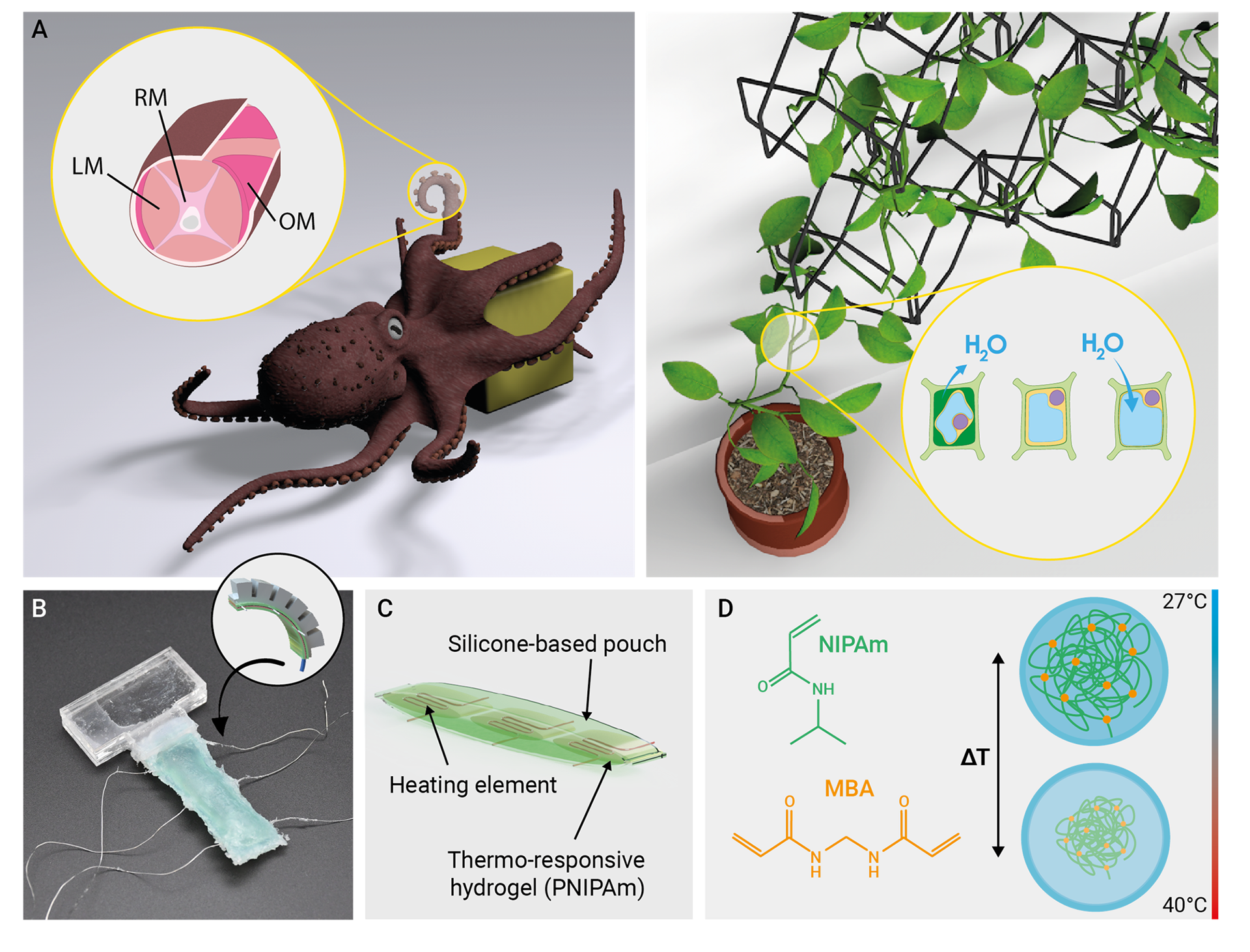
Selective Stiffening in Soft Actuators by Triggered Phase Transition of Hydrogel-Filled Elastomers.
Published: Advanced Functional Materials (2021)
Topic: A soft actuator that embodies a highly controllable thermo-responsive hydrogel and changes its stiffness on direct stimulation.
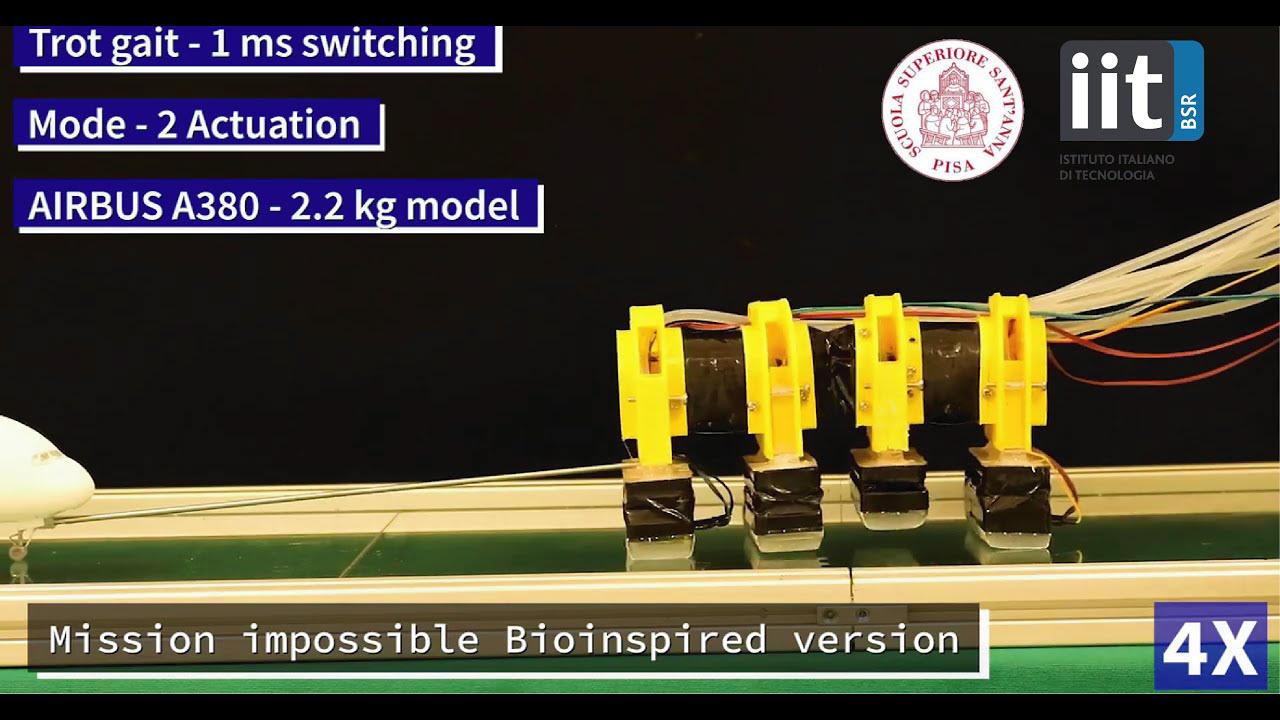
Sensorized foot module (SFM) demonstrated as a crawling robot pulling an airbus A380 model weighing 2.2 kg.
A Soft Sensorized Foot Module to Understand Anisotropic Terrains During Soft Robot Locomotion.
Published: IEEE Robotics and Automation Letters (2020)
IEEE International conference in Soft Robotics (RoboSoft 2020)
Topic: Sensorized foot to understand anisotropic terrains using adaptable barometric pressure sensor.
Paper link: Sensorized Foot Module (SFM)
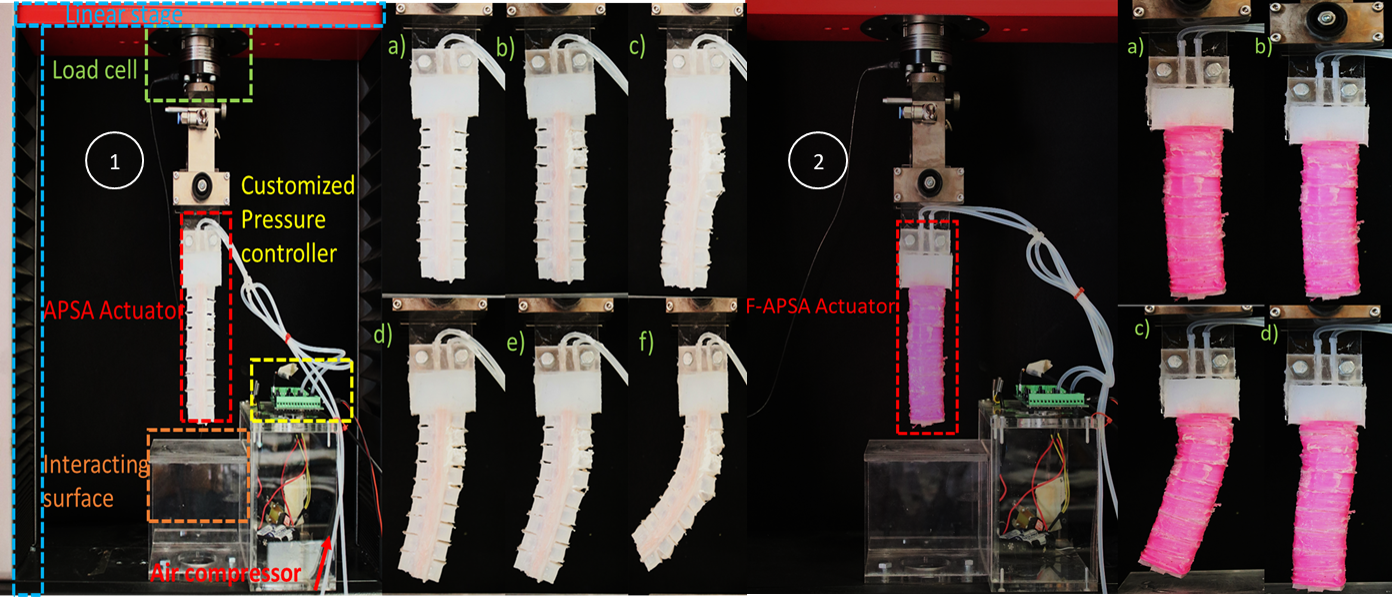
Experimental setup for two different actuators (APA Pneunet and FRA) motion under axial and lateral test position with actuation pressure
Antagonistic Pneumatic Actuator with Variable Stiffness for Soft Robotic Applications
Published: IEEE International conference in Soft Robotics (RoboSoft 2019)
Topic: Soft Actuator
Paper link: Variable Stiffness Actuator
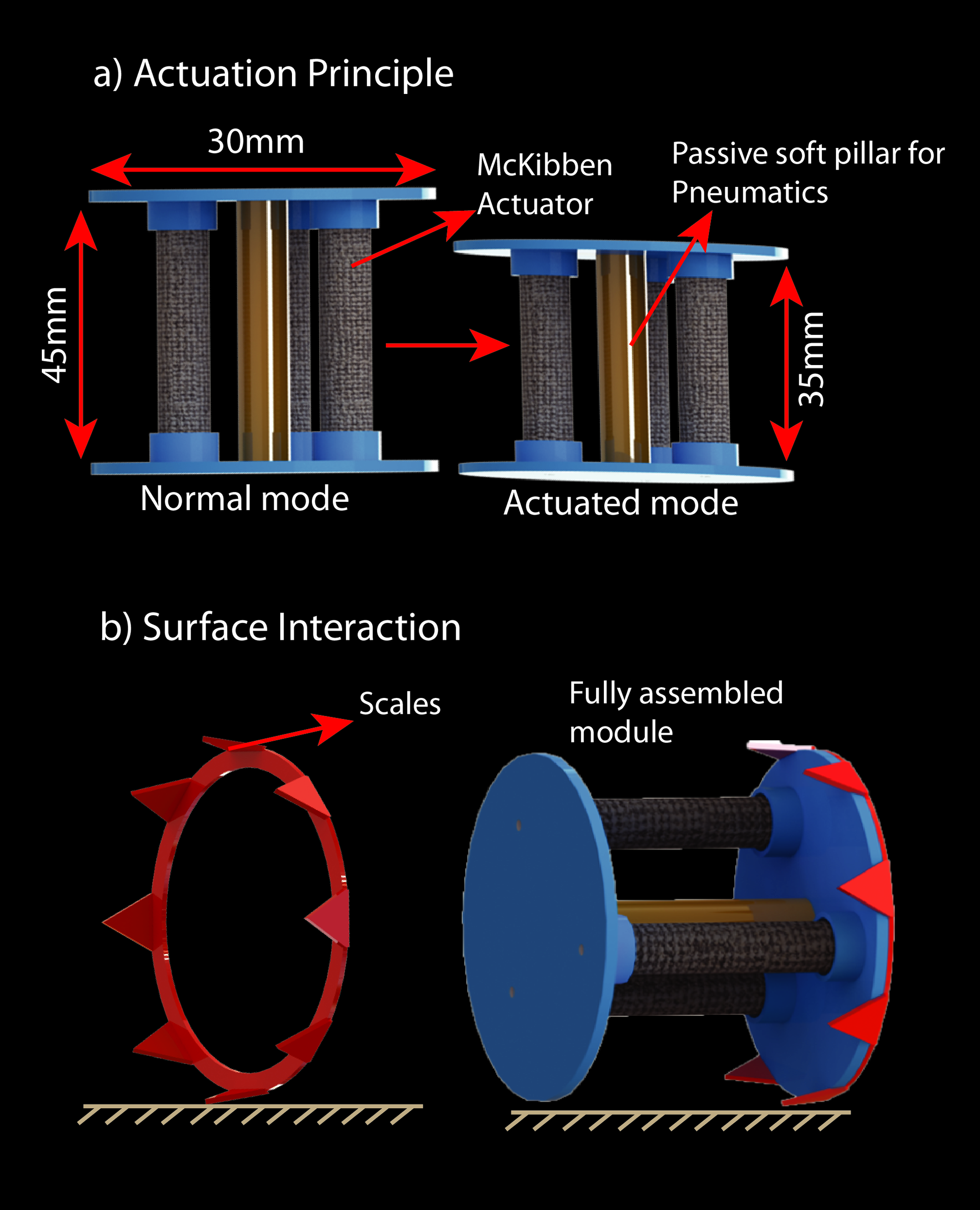
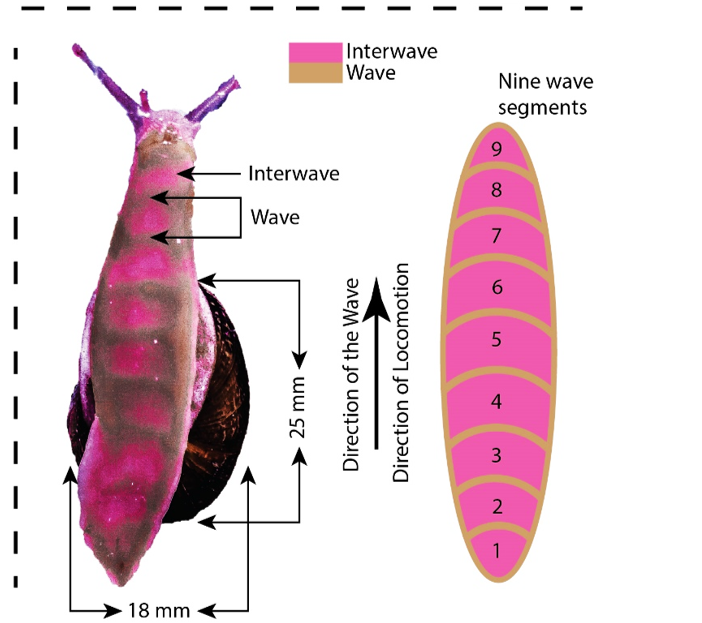
Module design for WaveBot. a) Actuation principle using a pneumatically actuated braided actuator with initial position (normal mode) and compressed state (actuate mode). b) Scale to enhance the friction to the interacting surface.
Preliminary Study on Locomotion Performance of WaveBot on Different Surfaces using Traveling Waves
Published: The 9th International Symposium on Adaptive Motion of Animals and Machines (EPFL 2019)
Topic: Modular robotic design
Paper link: WaveBot
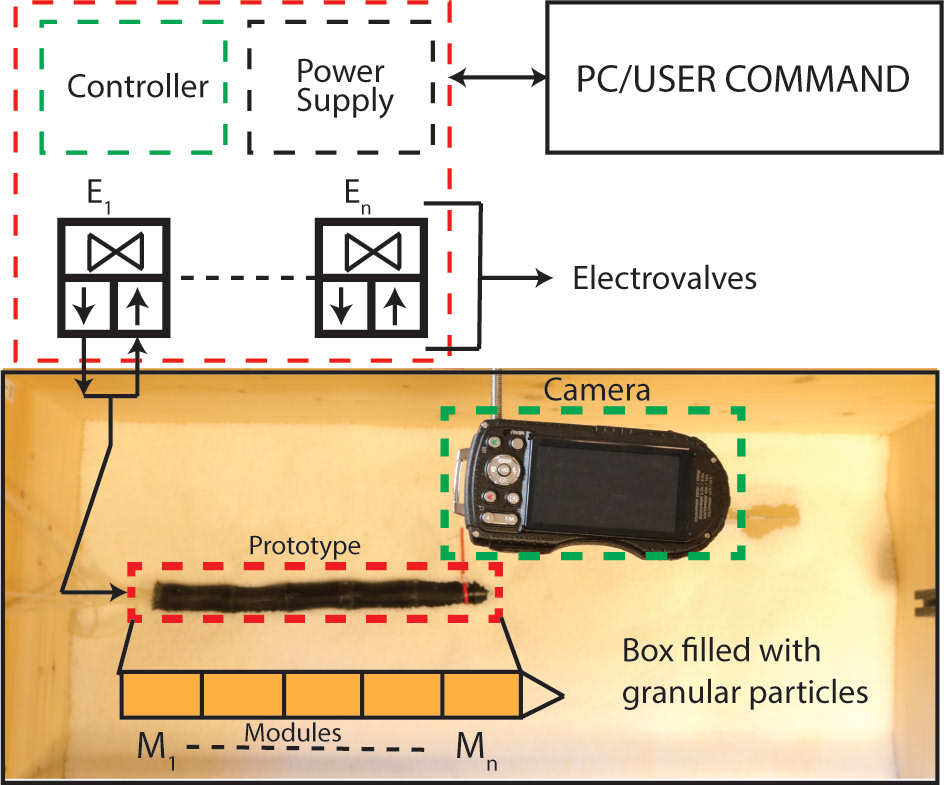
Schematic of the experimental setup used for locomotion tests in different media.
Soft Robotic Locomotion by Peristaltic Waves in Granular Media
Published: IEEE International conference in Soft Robotics (RoboSoft 2020)
Topic: Peristaltic robot (study on wave-patterns )
Paper link: Peristaltic locomotion in granular media