SPYRO - Displayed after successfully winning the competition after a long challenge.
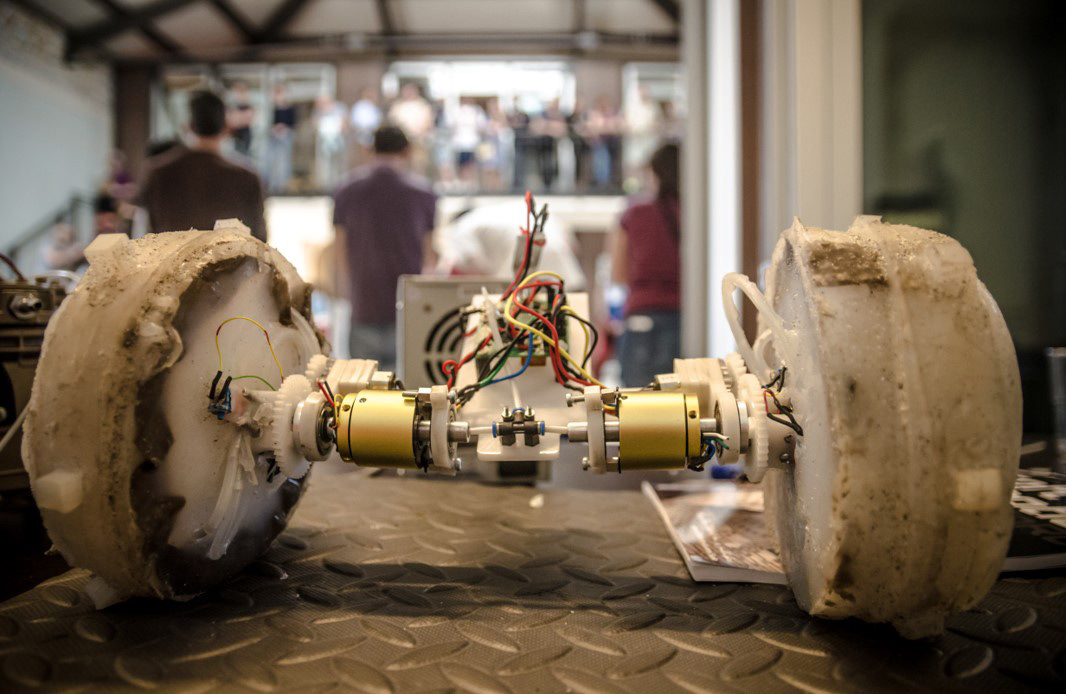
SPYRO - Inflatable Spherical Robot for Unstructured Terrain
Winner: Soft Robotics Competition, 2018 @IEEE International Conference on Soft Robotics.
News link: Italian new channel [Link]
Short description: Inflatable wheels helps the rover to alter its size and orientation when facing obstacles of such variant. Design and Manufacturing plays a major role to overcome all the obstacles placed for the competition.
ASTRO - Displayed to describe the component and characteristics as performance based soft robot.
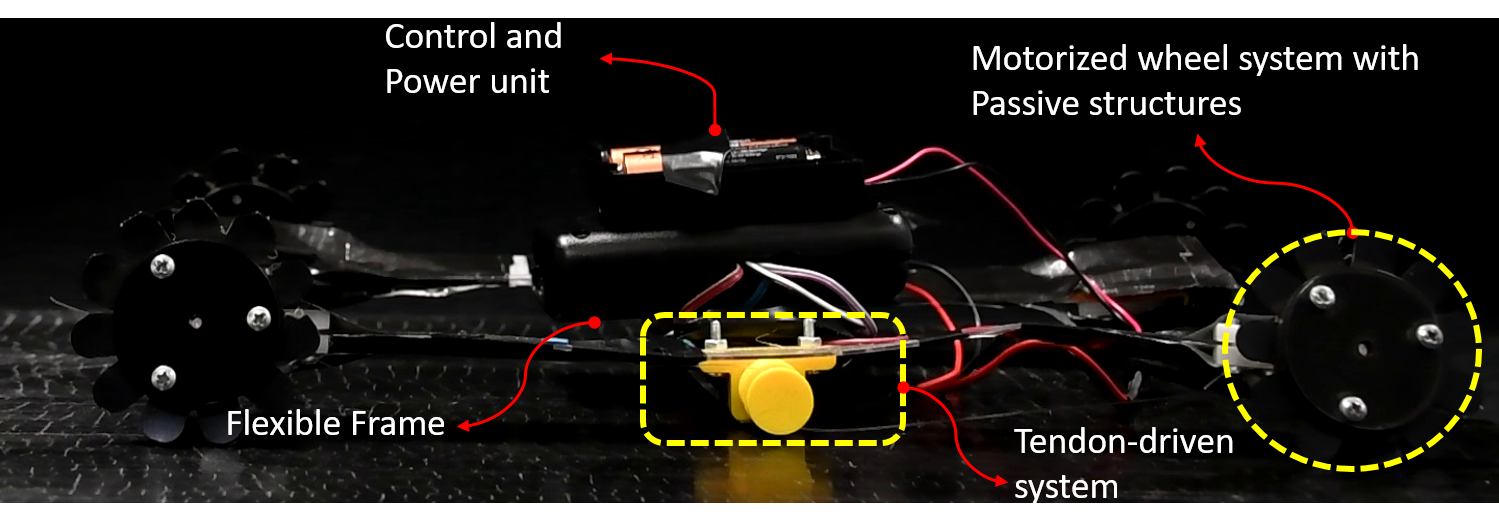
ASTRO - Agile and Soft Tele-operated Robot
Participated: Soft Robotics Competition, 2019 @IEEE International Conference on Soft Robotics. (4th place)
Video link: Functions and performance [Link].
Short description: Flexible structure to deform the complete robot to alter its size and orientation when facing obstacles or constraint of such variant. Design and rapid prototyping plays a major role to overcome all the obstacles placed for the competition.
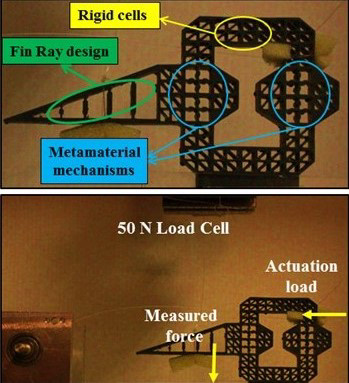
Fully 3D printed Gripper with Metamaterial Structures.
Participated: Soft Robotics Competition, 2019 @IEEE International Conference on Soft Robotics.
Video link: Functions and performance (TBA).
Short description: Stereolithography based 3D printed gripper with manufactured structural memory to reduce the cost of energy.